§ 2 Basic Units and Linear Interpolation
1.
Basic unit and type function
The basic unit refers to a sub-region with a straight boundary, only its vertices are taken as nodes, and only the undetermined function values are used as node parameter values. Commonly used geometric shapes are
A one-dimensional line segment (two nodes).
Two-dimensional triangle (three nodes), quadrilateral (four nodes).
Three-dimensional tetrahedron (four nodes), hexahedron (eight nodes).
On such elements, the interpolation function is a linear, bilinear, or trilinear polynomial, ie once for each coordinate variable x , y or z .
For the sake of clarity , in this section, we use P to denote the change point of the coordinates , and P i to denote the node. Suppose the element has p nodes , its local serial number is , the local coordinate is , and the corresponding global Cartesian coordinate is taken as . These coordinate systems are all right-handed.![]()
![]()
![]()
![]()
![]()
![]()
If there are also p polynomials in the basic unit that satisfy the condition:![]()
(i) The sum of
p polynomials is always equal to 1 , i.e.![]()
![]() ( 8 )
( 8 )
(ii)
any node takes the value 1 , and the remaining p - 1 nodes take the value 0 , that is![]()
![]()
![]()
![]() ( 9 )
( 9 )
is called the type function of the unit. A function that can be written as OR .![]()
![]()
![]()
![]()
The type function of the basic unit exists and is linear (including bilinear and trilinear). Therefore, for a linear interpolation function , including ( as a linear function of the coordinates themselves ) can be expressed as![]()
![]()
![]()
![]() ( 10 )
( 10 )
![]()
![]() ( 11 )
( 11 )
2.
Linear segment unit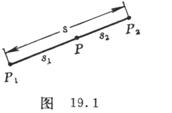
[ Distance coordinates ] Set the two endpoints of the straight line segment to be , then the distance coordinate of any point P on the line segment is defined as![]()
![]()
![]()
Obviously , the distance coordinates of the endpoints are ( 1 , 0 ), ( 0 , 1), and there are![]()
![]()
![]()
[ Type function ] The distance coordinates ( i = 1 , 2 ) themselves can be taken as the type function . The relation between them and the Cartesian coordinates is according to ( 11 ) as![]()
![]()
![]()
![]()
[ Coordinate transformation ] Since P is on the straight line segment , there is only one independent coordinate variable , which is assumed to be x ; similarly, there is only one independence for its distance coordinate , which is assumed to be taken . from the above two formulas![]()
![]()
![]()
[ Linear interpolation function ]
![]()
![]()
3.
Triangular element
 [ Area coordinate ] Let the vertex of the triangle be , then the area coordinate of any point P of the triangle is defined as
[ Area coordinate ] Let the vertex of the triangle be , then the area coordinate of any point P of the triangle is defined as![]()
![]()
![]() ( i =1 ,2,3 )
( i =1 ,2,3 )
In the formula, it represents the area formed by P and the opposite side , A is the area, and respectively represents P and the distance to it. Obviously the area coordinates are ( 1,0,0 ), ( 0,1,0 ), ( 0,0,1 ), and there are![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
[ Type function ] ![]() is the area coordinates , and the linear relationship between them and the rectangular coordinates is
is the area coordinates , and the linear relationship between them and the rectangular coordinates is![]()
![]()
![]()
[ Coordinate transformation and its Jacobian ]
Since P is on the plane , there are only two independent coordinate variables , which are assumed to be x and y ; similarly , there are only two independent area coordinates , which are assumed to be taken . From the above two equations can be obtained![]()
![]()
In the formula ,![]()
Its absolute value is equal to the unit area A ie .![]()
The Jacobian ( that is, the determinant of the transformation matrix ) is
The inverse transformation matrix is
[ Linear interpolation function ]
![]()
![]()
Taking advantage of the circularity, the type function with x , y as variables can be written as![]()
Four,
quadrilateral unit
 [ Bidirectional distance coordinates ] Starting from a vertex of the quadrilateral, define the distance coordinates on the two adjacent sides ; then define the distance coordinates in the same direction on the opposite edge . Connect , and the variable points with the same distance coordinates into straight line segments to form a local coordinate network. So any point P of the quadrilateral is a node of the coordinate network , and its local coordinates ( ξ , η ) can be taken separately , and the second distance coordinate of the two line segments (ie ). In this way , a one-to- one correspondence is established between quadrilaterals in the Cartesian coordinate system and element squares ( 0 ≤ ξ ≤ 1 , 0 ≤ η ≤ 1 ) in the local coordinate system ( Figure 19.3 ) .
[ Bidirectional distance coordinates ] Starting from a vertex of the quadrilateral, define the distance coordinates on the two adjacent sides ; then define the distance coordinates in the same direction on the opposite edge . Connect , and the variable points with the same distance coordinates into straight line segments to form a local coordinate network. So any point P of the quadrilateral is a node of the coordinate network , and its local coordinates ( ξ , η ) can be taken separately , and the second distance coordinate of the two line segments (ie ). In this way , a one-to- one correspondence is established between quadrilaterals in the Cartesian coordinate system and element squares ( 0 ≤ ξ ≤ 1 , 0 ≤ η ≤ 1 ) in the local coordinate system ( Figure 19.3 ) .![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
The [ type function ]
is obviously desirable for the unit square , , which is bilinear , that is, linear for either ξ or η . Since the local coordinates of the vertices are 1 or 0 , the type function can also be written uniformly as![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() ( i =1 ,2,3,4 )
( i =1 ,2,3,4 )
[ Coordinate transformation and its Jacobian ]
![]()
![]()
The Jacobian (that is, the determinant of the transformation matrix) is
The inverse transformation matrix is
Its elements are fractional linear functions of ξ , η .
[ Bilinear interpolation function ]
![]()
![]()
5.
Tetrahedral unit
[ Volume coordinates ]
Let the vertices of the tetrahedron be ( i = 1, 2, 3, 4 ), then the volume coordinates of any point P of the tetrahedron are defined as![]()
![]()

![]() ( i =1 ,2,3,4 )
( i =1 ,2,3,4 )
In the formula, it represents the volume of the tetrahedron formed by P and the corresponding base triangle , V is the volume of the tetrahedron unit , and respectively represents P and the distance from the base. Obviously , except for the volume coordinates of , the others have![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() ( 12 )
( 12 )
The [ type function ] ![]() is the volume coordinates ( i = 1, 2, 3, 4 ), and the linear relationship between them and the rectangular coordinates is
is the volume coordinates ( i = 1, 2, 3, 4 ), and the linear relationship between them and the rectangular coordinates is![]()
![]()
![]() ( 13 )
( 13 )
[ Coordinate transformation and its Jacobian ]
Assuming independent variables , then from (12) , (13) above![]()
in the formula
 , ,
, ,
![]()
Its absolute value is equal to the unit volume V ie .![]()
The Jacobian (that is, the determinant of the transformation matrix) is
The inverse transformation matrix is
[ Linear interpolation function ]
![]()
![]()
From (12), (13) can be directly obtained
The elements of the coefficient matrix on the right-hand side of the equation can be defined cyclically as follows:
In fact, it is not difficult to see , , ..., but here the third-order determinant is used to replace the second-order determinant such as X i4 , which is convenient for loop definition , and the result is still the same.![]()
![]()
6.
Hexahedral unit
[ Three-way distance coordinates ] Let the vertices of the hexahedron be ( i = 1, 2, … , 8 ) ( Figure 19.5 ) . Using bidirectional distance coordinates , first transform the quadrilateral to a unit square ( 0 ≤ ξ ≤ 1 , 0 ≤ η ≤ 1 ) on the coordinate plane ζ = 0 of the local coordinate system ( ξ , η , ζ ) ; then define the distance on the line segment coordinates , and take it as (1- ζ , ζ ), where ζ is 0 and 1 respectively![]()
![]()
![]()
![]() . Now use the two-way distance coordinate for the quadrilateral , and transform it to the unit square ( 0 ≤ ξ ≤ 1 , 0 ≤ η ≤ 1 ) on the coordinate plane ζ = 1 . This establishes a one-to-one correspondence between the quadrilateral and the points of the unit square on ζ = 0 and ζ = 1 , respectively. Finally, connect the points of the upper and lower quadrilaterals with the same local coordinates ( ξ , η ) into line segments , and define the distance coordinates (1- ζ , ζ ) along the direction ( from bottom to top ) . So the local coordinates of any point P on the line segment can be taken as ( ξ , η
. Now use the two-way distance coordinate for the quadrilateral , and transform it to the unit square ( 0 ≤ ξ ≤ 1 , 0 ≤ η ≤ 1 ) on the coordinate plane ζ = 1 . This establishes a one-to-one correspondence between the quadrilateral and the points of the unit square on ζ = 0 and ζ = 1 , respectively. Finally, connect the points of the upper and lower quadrilaterals with the same local coordinates ( ξ , η ) into line segments , and define the distance coordinates (1- ζ , ζ ) along the direction ( from bottom to top ) . So the local coordinates of any point P on the line segment can be taken as ( ξ , η![]()
![]()
![]()
![]() , ζ ) . In this way , a one-to- one correspondence is established between any hexahedral element in the rectangular coordinate system and the unit cube ( 0 ≤ ξ ≤ 1, 0 ≤ η ≤ 1 , 0 ≤ ζ ≤ 1 ) in the local coordinate system.
, ζ ) . In this way , a one-to- one correspondence is established between any hexahedral element in the rectangular coordinate system and the unit cube ( 0 ≤ ξ ≤ 1, 0 ≤ η ≤ 1 , 0 ≤ ζ ≤ 1 ) in the local coordinate system.

[ Type function ] For the unit cube, using the symmetry of the nodes, the type function is obtained as
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Since the local coordinates of the vertices are 1 or 0 , they can be written uniformly as![]()
![]()
![]()
![]() ( i = 1,2, … ,8 )
( i = 1,2, … ,8 )
It is trilinear , that is, linear to either ξ or η or ζ .
[ Coordinate transformation and its Jacobian ]
![]()
![]()
Again , it is trilinear. This indicates that the edges of the hexahedron should be straight segments.![]()
The Jacobian (that is, the determinant of the transformation matrix) is
in the formula
![]()
![]()
![]()
The transformation matrix can also be written as
It can be seen from the above formula that the quadratic coefficients of each row of the transformation matrix about ξ , η , ζ are the same .
![]()
![]()
![]()
![]()
There is also a corresponding notation for the pair , then the transformation matrix can be written as![]()
![]()

Its determinant is a quartic polynomial of ξ , η , ζ , and the coefficients of the terms are zero.![]()
[ Trilinear interpolation function ]
![]()
7.
Triangular prism unit
 [ Local coordinates ] The area coordinates of the upper and lower base triangles can be used , and the distance coordinates can be used to form local coordinates along the height direction . Let ξ and η take the second and third area coordinates , and ζ take the second distance coordinate , so the triangular prism in the rectangular coordinate system and the unit triangular prism in the local coordinate system ( the upper and lower bases are isosceles right triangles with a side of 1 , The height is 1 , as shown in Figure 19.6 ) to establish a one-to-one correspondence.
[ Local coordinates ] The area coordinates of the upper and lower base triangles can be used , and the distance coordinates can be used to form local coordinates along the height direction . Let ξ and η take the second and third area coordinates , and ζ take the second distance coordinate , so the triangular prism in the rectangular coordinate system and the unit triangular prism in the local coordinate system ( the upper and lower bases are isosceles right triangles with a side of 1 , The height is 1 , as shown in Figure 19.6 ) to establish a one-to-one correspondence.
[ type function ]
![]()
![]()
![]()
![]()
![]()
![]()
Since the local coordinates of the vertices are 1 or 0 , they can be written uniformly as![]()
![]()
![]()
![]()
( i =1 ,2 , … ,6 )
[ Coordinate transformation and its Jacobian ]
|
|

The transformation matrix is
The Jacobian is

in the formula
![]()
The rest can be similarly defined.![]()
Eight,
the characteristics of the basic unit
Based on the above, it can be seen that the basic unit has the following characteristics:
The 1° basic unit has a simple shape , so it is widely used. The expressions of coordinate transformation and interpolation are all linear ( including bilinear and trilinear ) and have the same pattern . Two adjacent basic units are compatible on the common boundary , that is, maintain continuity.
2° In the element analysis, the differential and integral operations of ( x , y , z ) are usually carried out by using local coordinates , which requires the use of transformation matrix and Jacobian formula J . Except for the hexahedral element , its expression is relatively simple . If the shape of the hexahedron is simple , for example, a series of regular hexahedrons parallel to the rectangular coordinates are used as the unit , then the coordinate transformation is degenerated to linear, and the transformation matrix is also very simple.
3° When selecting the shape of the element , in order to reduce the interpolation error , the triangular or tetrahedral element should not be too sharp or too flat ; the quadrilateral or hexahedral element should be convex and not too sharp or too flat.
The local coordinate system of the 4° basic unit is formed by the internal metric ratio coordinates , and the corresponding relationship with the rectangular coordinate system is directly expressed by the type function. Since the elements are regular in the local coordinate system and the type function is easy to form , this method is not only effective for basic elements , but also can be extended to other types of elements ( see the next two sections ) .